Abstract
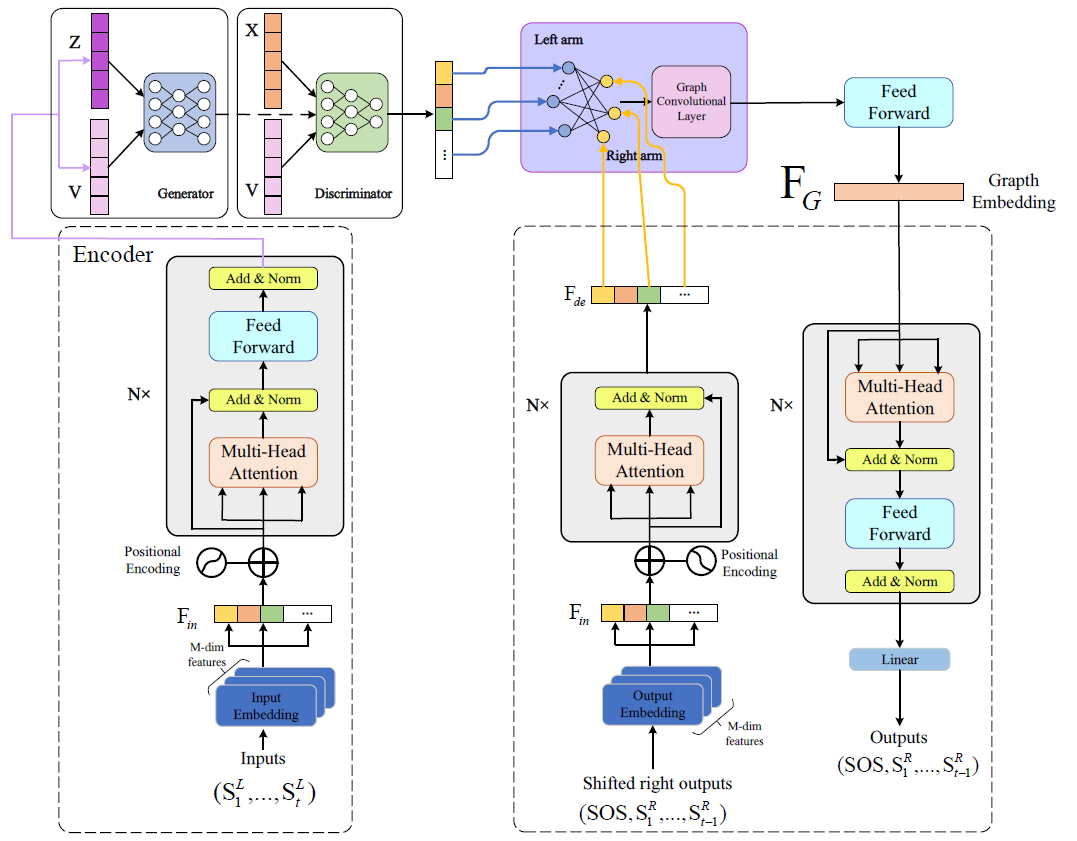
This study focuses on optimizing multimodal robot route planning in intelligent logistics management by integrating Transformer models, Graph Neural Networks (GNNs), and Generative Adversarial Networks (GANs). Using a graph structure representing map information, cargo distribution, and robot states, spatial and resource constraints are considered to optimize paths. Extensive simulations based on real logistics datasets demonstrate significant improvements over traditional methods, with an average 15\% reduction in path length, 20% improvement in time efficiency, and 10% reduction in energy consumption. These results underscore the effectiveness and superiority of the proposed multimodal path planning algorithm, offering robust support for advancing intelligent logistics management.
Keywords
multimodal robots
deep path planning
transformer model
graph neural network
generative adversarial network
Funding
This work was supported without any funding.
Cite This Article
APA Style
Luo, H., Wei, J., Zhao, S., Liang, A., Xu, Z., & Jiang, R. (2024). Intelligent Logistics Management Robot Path Planning Algorithm Integrating Transformer and GCN Network. IECE Transactions on Internet of Things, 2(4), 95–112. https://doi.org/10.62762/TIOT.2024.918236
Publisher's Note
IECE stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Institute of Emerging and Computer Engineers (IECE) or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.





 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue