Abstract
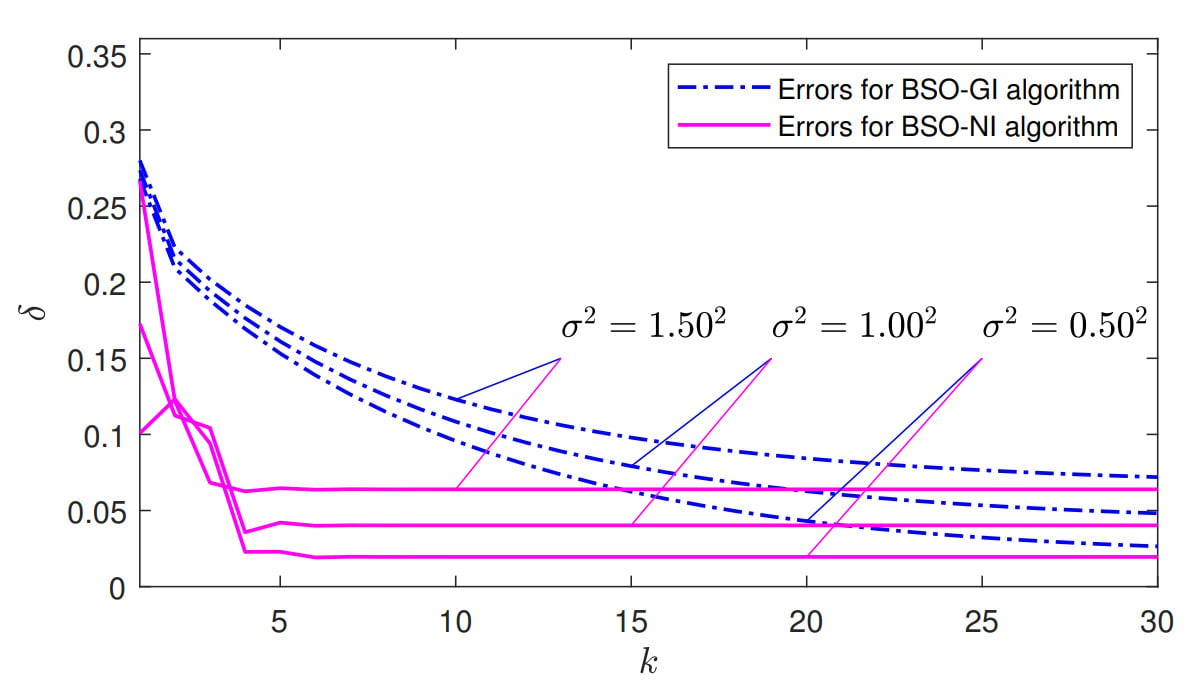
This study addresses the challenge of estimating parameters iteratively in bilinear state-space systems affected by stochastic noise. A Newton iterative (NI) algorithm is introduced by utilizing the Newton search and iterative identification theory for identifying the system parameters. Following the estimation of the unknown parameters, we create a bilinear state observer (BSO) using the Kalman filtering principle for state estimation. Subsequently, we propose the BSO-NI algorithm for simultaneous parameter and state estimation. An iterative algorithm based on gradients is given for comparisons to illustrate the effectiveness of the proposed algorithms.
Data Availability Statement
Data will be made available on request.
Funding
This work was supported by the Young Scientists Fund of the National Natural Science Foundation of Zhejiang Province, China under Grant LQN25F030017.
Conflicts of Interest
The authors declare no conflicts of interest.
Ethical Approval and Consent to Participate
Not applicable.
Cite This Article
APA Style
Liu, S., & Ding, F. (2025). Iterative Estimation Algorithm for Bilinear Stochastic Systems by Using the Newton Search. IECE Transactions on Intelligent Systematics, 2(2), 76–84. https://doi.org/10.62762/TIS.2024.155941
Publisher's Note
IECE stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Institute of Emerging and Computer Engineers (IECE) or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.



 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue