Abstract
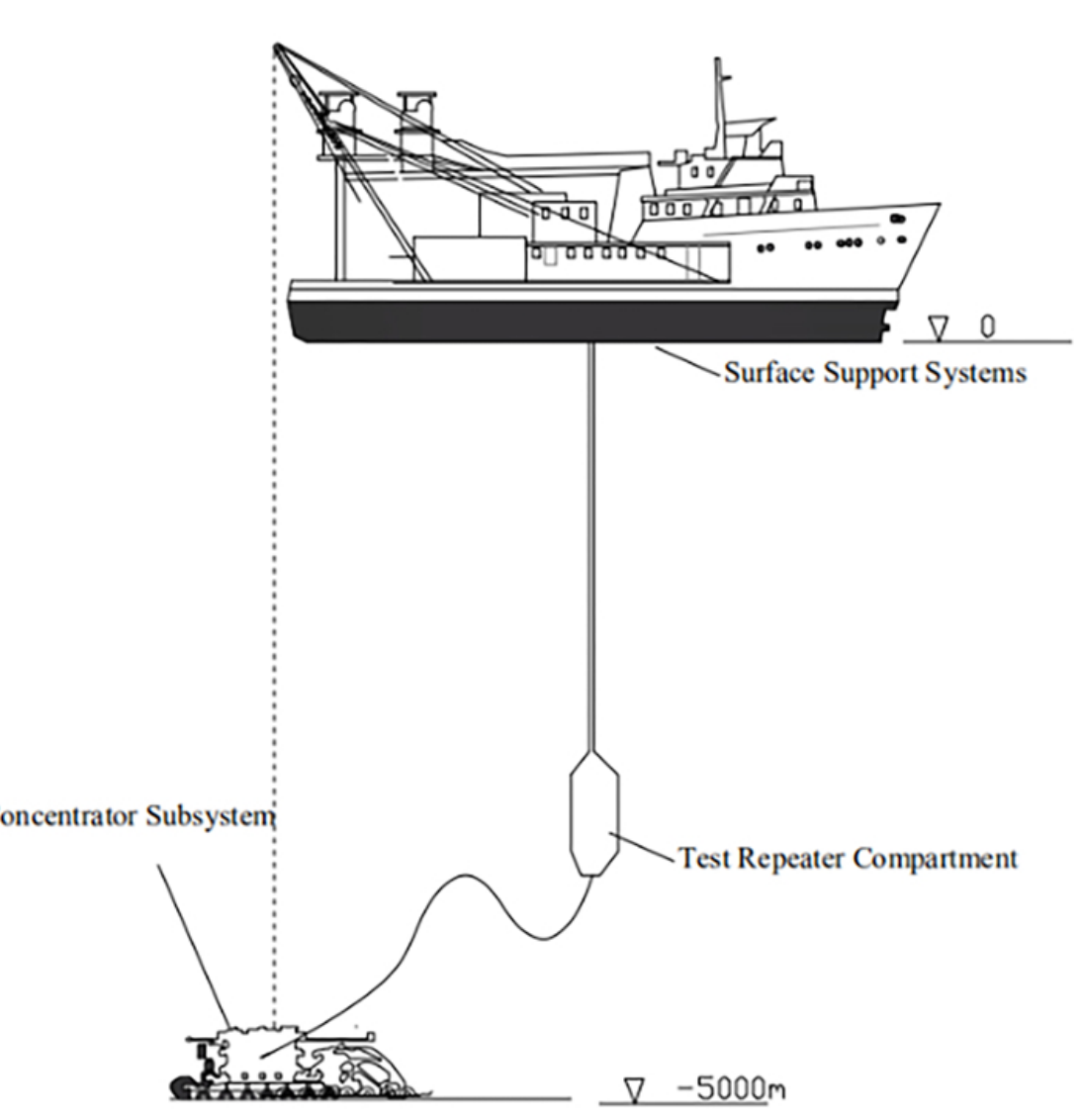
This paper explores the effectiveness of Model Predictive Control (MPC) for trajectory tracking in autonomous deep-sea tracked mining vehicles operating within polymetallic nodule mining environments, considering model uncertainties and external disturbances. Traditional applications of MPC in autonomous vehicle trajectory tracking, which typically rely on kinematic models under minimal external disturbance, often fail when faced with model inaccuracies and external disruptions. To address these challenges, we propose an MPC-based trajectory tracking algorithm that includes a speed correction controller for the drive wheel. This controller, developed through experimental data fitting, aims to mitigate issues such as vehicle body subsidence and track slippage. Tracking accuracy, particularly in curve navigation, is further enhanced through the use of Kalman Filtering (KF) and Adaptive Kalman Filtering (AKF) to counteract external disturbances. Moreover, we introduce an obstacle avoidance strategy utilizing a tri-circular arc trajectory with uniform curvature for path re-planning. This strategy effectively addresses dead zones and physical obstructions encountered during operation. The superiority of our approach compared to conventional Nonlinear MPC (NMPC) is demonstrated through extensive Simulink and Recurdyn co-simulations.
Keywords
Deep-sea tracked mining vehicle
Trajectory tracking
Model predictive control
Kalman filter
Path planning
Funding
This work was supported without any funding.
Cite This Article
APA Style
Wu, H., Chen, Y., & Qin, H. (2024). Model Predictive Control for Enhanced Trajectory Tracking of Autonomous Deep-Sea Tracked Mining Vehicles. IECE Transactions on Intelligent Unmanned Systems, 1(1), 31–43. https://doi.org/10.62762/TIUS.2024.557673
Publisher's Note
IECE stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Institute of Emerging and Computer Engineers (IECE) or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.




 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue