Abstract
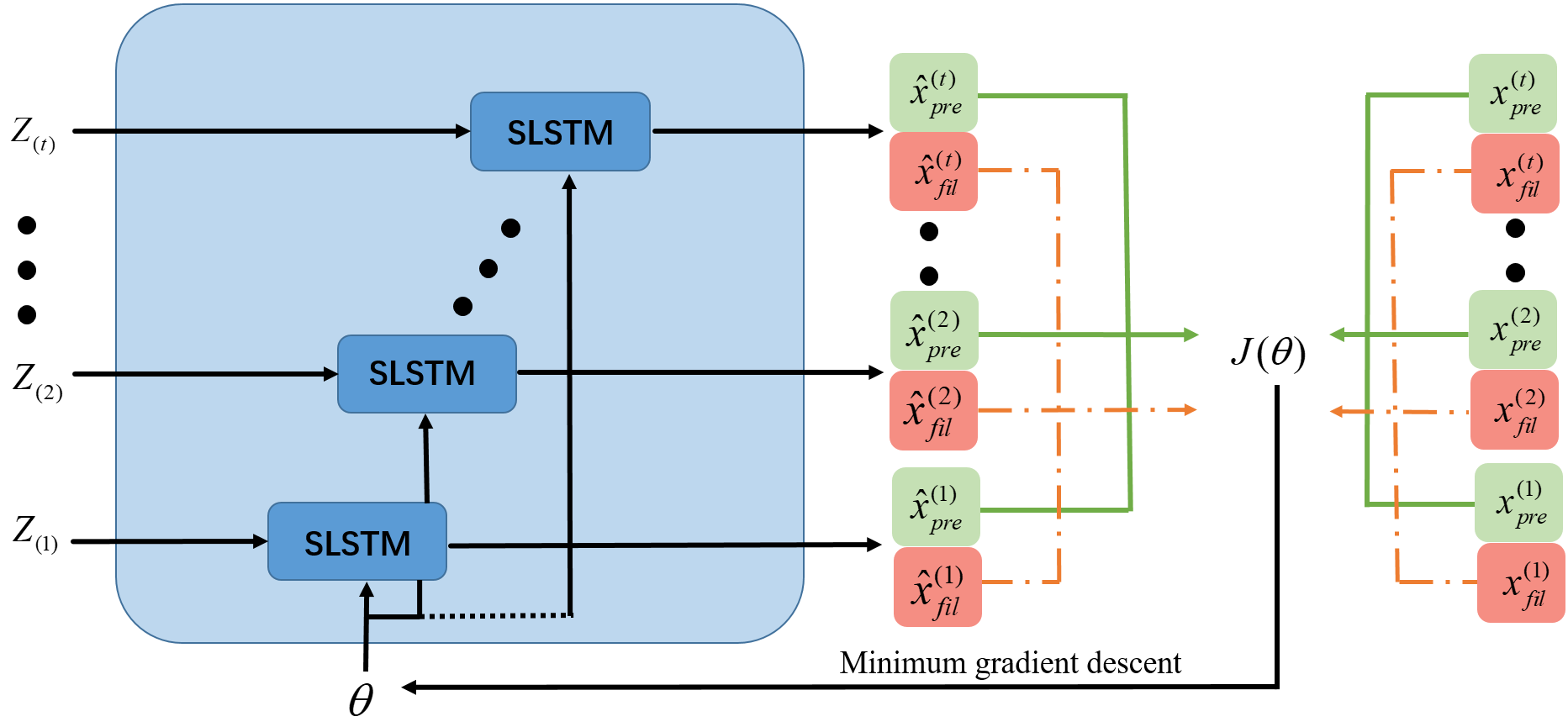
Maneuvering target tracking is widely used in unmanned vehicles, missile navigation, underwater ships, etc. Due to the uncertainty of the moving characteristics of maneuvering targets and the low sensor measurement accuracy, trajectory tracking has always been an open research problem and challenging work. This paper proposes a trajectory estimation method based on LSTM neural network for uncertain motion characteristics. The network consists of two LSTM networks with stacked serial relationships, one of which is used to predict the movement dynamics, and the other is used to update the track's state. Compared with the classical Kalman filter based on the maneuver model, the method proposed here does not need to model the motion characteristics and sensor characteristics. It can achieve high-performance tracking by learning historical data dynamics and sensor characteristics. Experimental results show that this method can effectively improve the trajectory estimation performance when the target motion is unknown and uncertain.
Funding
This work was supported without any funding.
Cite This Article
APA Style
Jin, X., Liu, S., Kong, J., Bai, Y., Su, T., & Ma, H. (2024). GPS Tracking Based on Stacked-Serial LSTM Network. Chinese Journal of Information Fusion, 1(1), 50–62. https://doi.org/10.62762/CJIF.2024.361889
Publisher's Note
IECE stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Institute of Emerging and Computer Engineers (IECE) or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.







 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue