Abstract
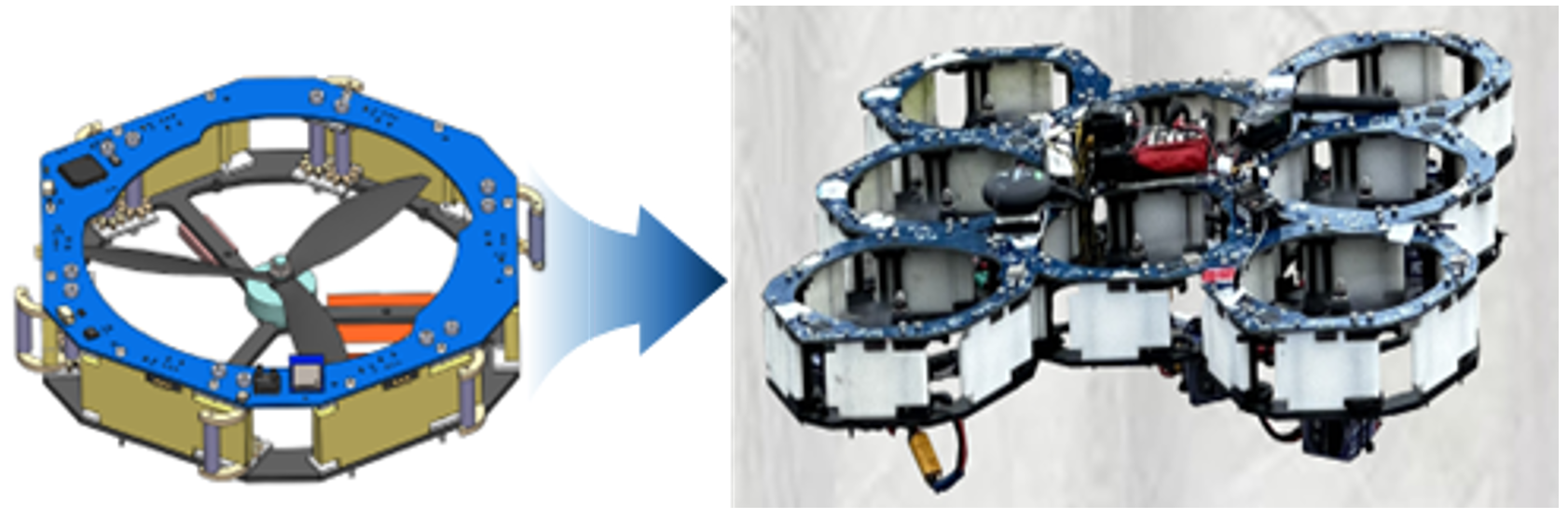
With the increasing complexity of the working environment and the diversification of mission requirements of UAVs, traditional UAVs have a fixed structure and single function. It is difficult to be applied in occasions with complex environments and changing load demands. The modular reconfigurable flight array (MRFA) is composed of no less than four isomorphic unit modules that are freely spliced together. By adding or removing flight unit modules and adjusting the arrangement of flight unit modules, the configuration of the MRFA can be changed, so that it can adapt to complex environments and then complete different flight missions. In the process of MRFA research and development, online configuration identification has become one of important problem to be solved. In this paper, a configuration recognition algorithm is designed based on the breadth-first searching method to identify the online structure of MRFA firstly. Then, the dynamic model of the aircraft is carried out according to the obtained configuration information. At the same time, the mathematical model and configuration information of the MRFA are combined to establish an optimization control allocation mechanism to allocate suitable rotational speed for multiple rotors. Finally, several examples are carried out to show that the proposed technology can recognize the configuration with 100% recognition rate and average online recognition time 569.4ms. Then a cascade PID controller is designed to realize the flight control of the irregular MRFA with faster tracking performance of no more than 40 seconds.
Keywords
The modular reconfigurable flight array
Breadth-first search
Configuration recognition
Dynamic modeling
Control allocation
Funding
This work was supported by National Nature Science Foundation under of China Grant (62463014, 62273169), Yunnan Fundamental Research Projects (Grant NO.202301A T070401).
Cite This Article
APA Style
Ren, B., Liu, J., Zhang, S., Yang, C., & Na, J. (2024). On-line Configuration Identification and Control of Modular Reconfigurable Flight Array. IECE Transactions on Intelligent Systematics, 1(2),
91-101. https://doi.org/10.62762/TIS.2024.681878
Publisher's Note
IECE stays neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Institute of Emerging and Computer Engineers (IECE) or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.






 Submit Manuscript
Edit a Special Issue
Submit Manuscript
Edit a Special Issue