Chinese Journal of Information Fusion | Volume 2, Issue 1: 38-58, 2025 | DOI: 10.62762/CJIF.2025.919344
Abstract
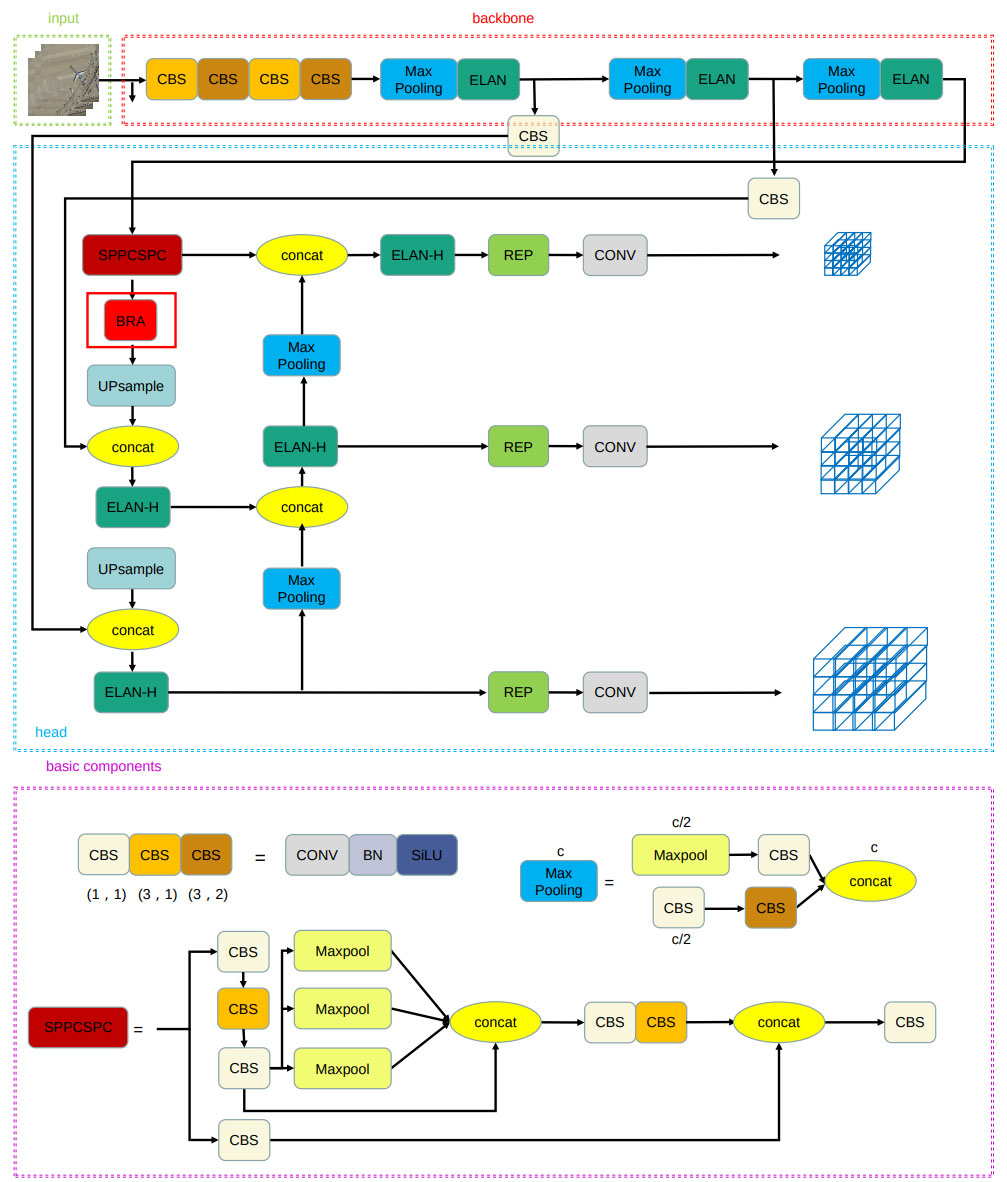
With the progressive advancement of remote sensing image technology, its application in the agricultural domain is becoming increasingly prevalent. Both cultivation and transportation processes can greatly benefit from utilizing remote sensing images to ensure adequate food supply. However, such images often exist in harsh environments with many gaps and dense distribution, which poses major challenges to traditional target detection methods. The frequent missed detections and inaccurate bounding boxes severely constrain the further analysis and application of remote sensing images within the agricultural sector. This study presents an enhanced version of the YOLO algorithm, specifically tai... More >
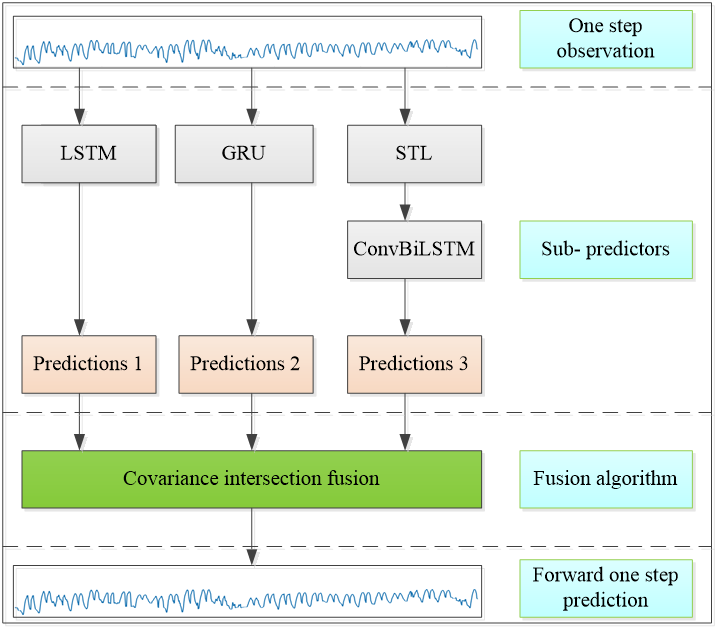
Graphical Abstract