IECE Transactions on Intelligent Systematics | Volume 1, Issue 1: 40-48, 2024 | DOI: 10.62762/TIS.2024.137329
Abstract
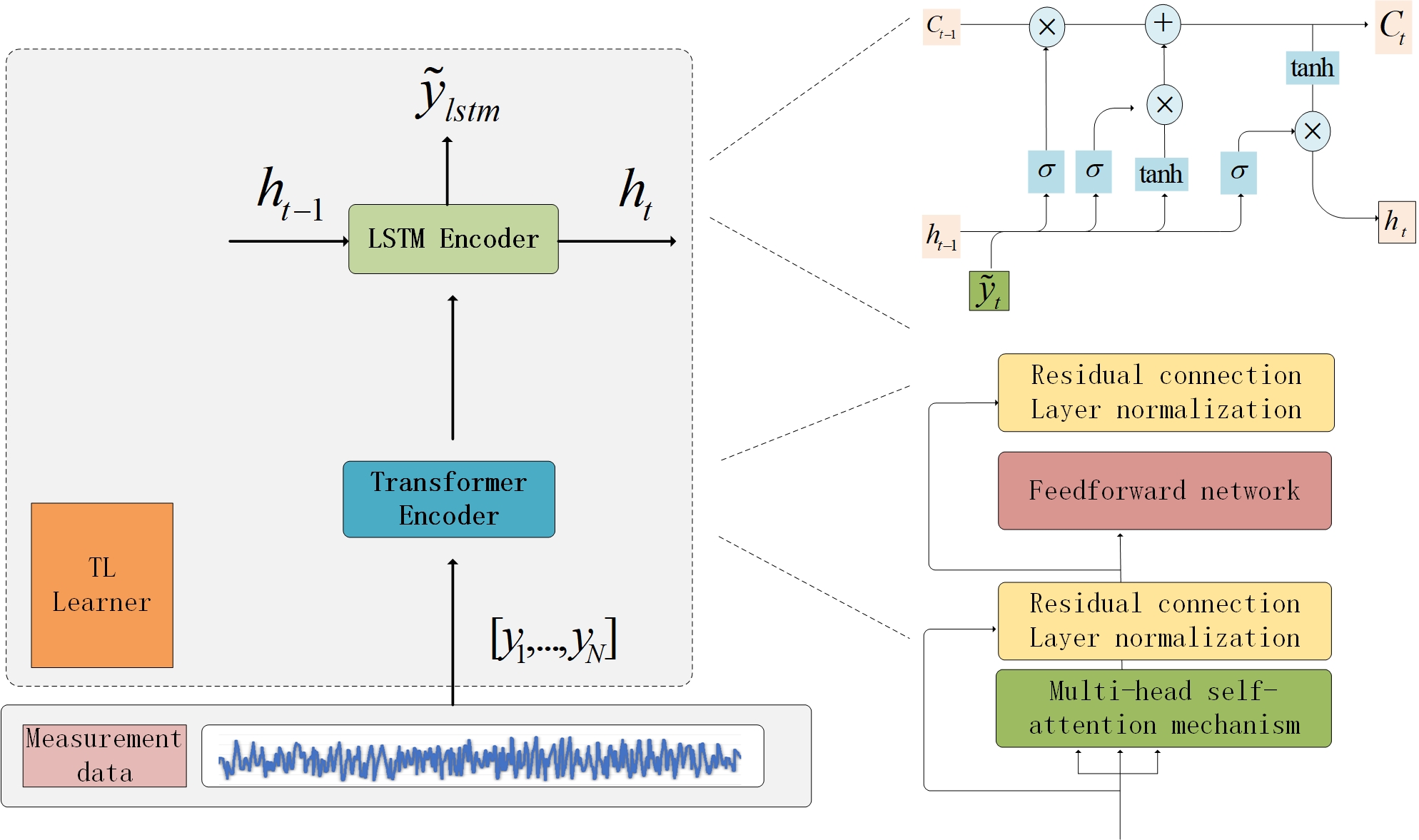
Nowadays, state estimation is widely used in fields such as autonomous driving and drone navigation. However, in practical applications, it is difficult to obtain accurate target motion models and noise covariance.This leads to a decrease in the estimation accuracy of traditional Kalman filters. To address this issue, this paper proposes an adaptive model free state estimation method based on attention parameter learning module. This method combines Transformer's encoder with Long Short Term Memory Network (LSTM), and obtains the system's operational characteristics through offline learning of measurement data without modeling the system dynamics and measurement characteristics. In addition,... More >
Graphical Abstract