Department of Electrical and Computer Engineering, McMaster University, Ontario, Canada
Summary
Thiagalingam Kirubarajan was born in Sri Lanka in 1969. He received the B.A. and M.A. degrees in electrical and information engineering from Cambridge University, Cambridge, U.K., in 1991 and 1993, respectively, and the M.S. and Ph.D. degrees in electrical engineering from the University of Connecticut, Storrs, CT, USA, in 1995 and 1998, respectively. He is currently a Professor with the Department of Electrical and Computer Engineering, McMaster University, Hamilton, ON, Canada. His research interests include estimation, target tracking, multisource information fusion, sensor resource management, signal detection, and fault diagnosis. His research activities are supported by U.S. Missile Defense Agency, U.S. Office ofNaval Research, NASA, Qualtech Systems, Inc., Raytheon Canada, Ltd., and Defense Research Development Canada, Ottawa. In September 2001, he served in a DARPA expert panel on unattended surveillance, homeland defense, and counterterrorism. He has also served as a Consultant in these areas to a number of com- panies, including Motorola Corporation, Northrop Grumman Corporation, Pacific-Sierra Research Corporation, Lockhead Martin Corporation, Qualtech Systems, Inc., Orincon Corporation, and BAE Systems. He has worked on the development of a number of engineering software programs, including BEARDAT for target localization from bearing and frequency measurements in clutter and FUSEDAT for fusion of multisensor data for tracking. He has also worked with Qualtech Systems, Inc., to develop an advanced fault diagnosis engine. He has authored/coauthored more than 360 articles in the areas of his research interests, in addition to one book on estimation, tracking and navigation, four edited volumes, and 12 book chapters. Dr. Kirubarajanwas the recipient of IEEE BarryAward andOntario Premier’s Research ExcellenceAward. Since 2004, he has been a Canada Research Chair in InformationFusion.
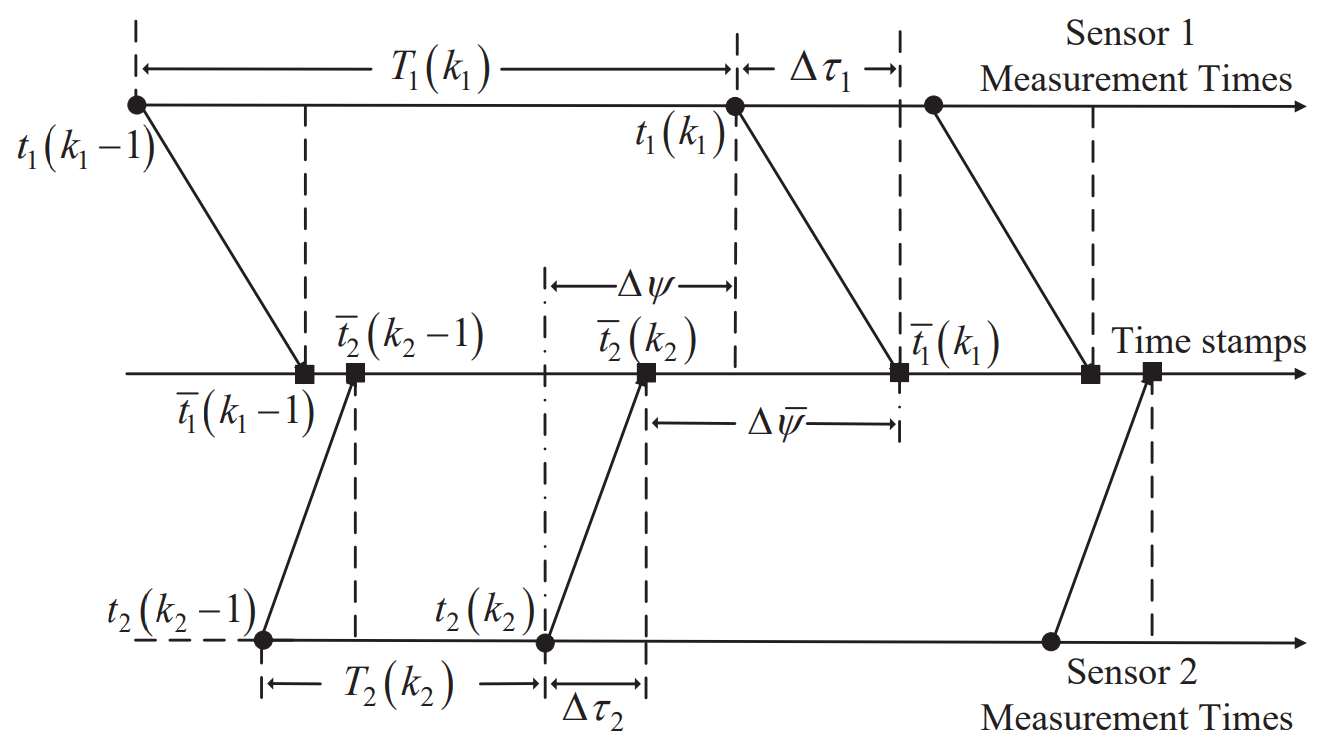
Bias estimation of sensors is an essential prerequisite for accurate data fusion. Neglect of temporal bias in general real systems prevents the existing algorithms from successful application. In this paper, both spatial and temporal biases in asynchronous multisensor systems are investigated and two novel methods for simultaneous spatiotemporal bias compensation and data fusion are presented. The general situation that the sensors sample at different times with different and varying periods is explored, and unknown time delays may exist between the time stamps and the true measurement times. Due to the time delays, the time stamp interval of the measurements from different sensors may be di... More >
Graphical Abstract
We use cookies
Our website uses cookies that are essential for its operation and additional cookies to track performance, or to improve and personalize our services. By clicking "Allow all cookies", you agree to the storing of cookies on your device. For more information on how we use cookies, please see our Cookie Policy.