
Chinese Journal of Information Fusion | Volume 1, Issue 1: 63-78, 2024 | DOI: 10.62762/CJIF.2024.361892
Abstract
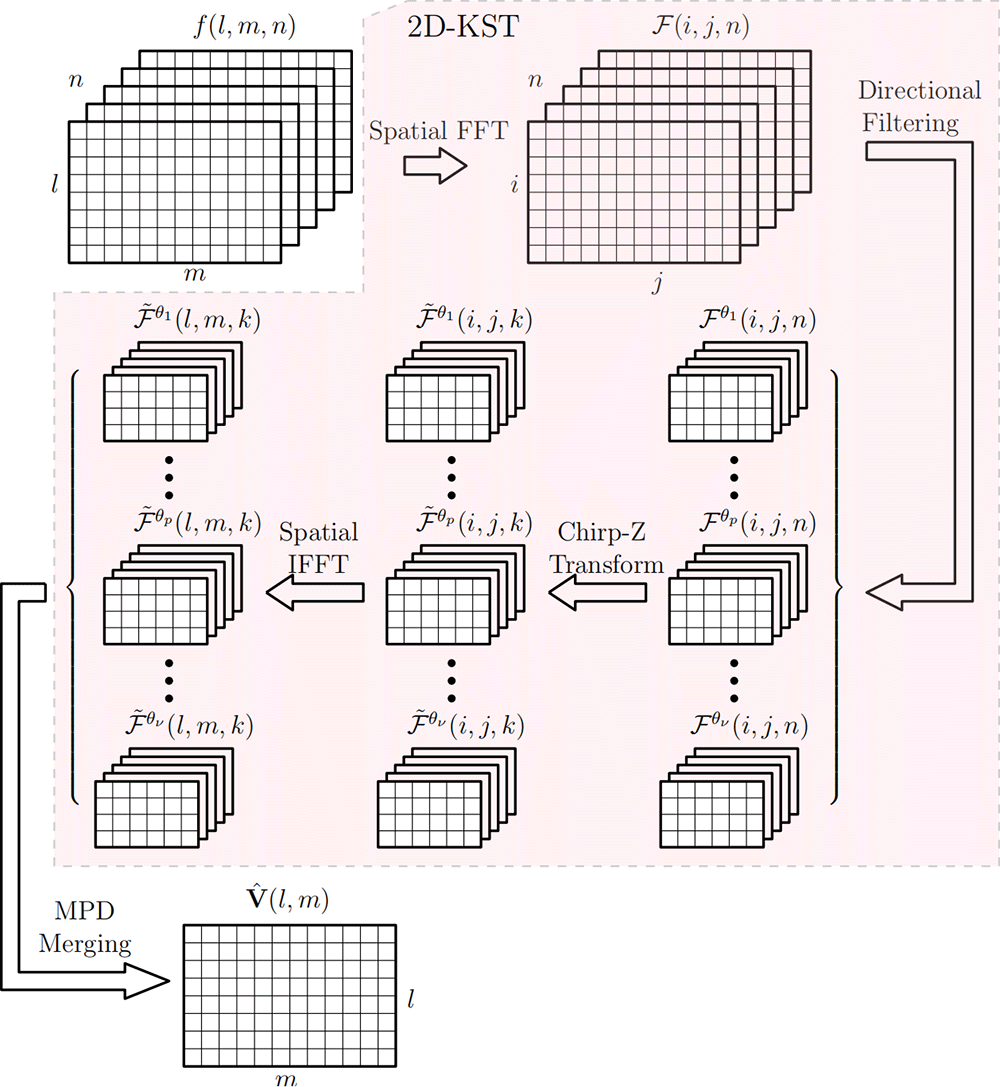
Considering the tractability of OGM (Occupancy Grid Map) and its wide use in the dynamic environment representation of mobile robotics, the extraction of motion information from successive OGMs are very important for many tasks, such as SLAM (Simultaneously Localization And Mapping) and DATMO (Detection and Tracking of Moving Object). In this paper, we propose a novel motion extraction method based on the signal transform, called as S-KST (Spatial Keystone Transform), for the motion detection and estimation from successive noisy OGMs. It extends the KST in radar imaging or motion compensation to 1D spatial case (1DS-KST) and 2D spatial case (2DS-KST) combined multiple hypotheses about poss... More >
Graphical Abstract