by
,

Chinese Journal of Information Fusion | Volume 1, Issue 2: 109-125, 2024 | DOI: 10.62762/CJIF.2024.596648
Abstract
In response to the challenges associated with the inefficiency and poor quality of 3D path planning for Unmanned Aerial Systems (UAS) operating in vast airspace, a novel two-layer path planning method is proposed based on a divide-and-conquer methodology. This method segregates the solution process into two distinct stages: heading planning and path planning, thereby ensuring the planning of both efficiency and path quality. Firstly, the path planning phase is formulated as a multi-objective optimization problem, taking into account the environmental constraints of the UAV mission and path safety. Subsequently, the multi-dimensional environmental data is transformed into a two-dimensional pr... More >
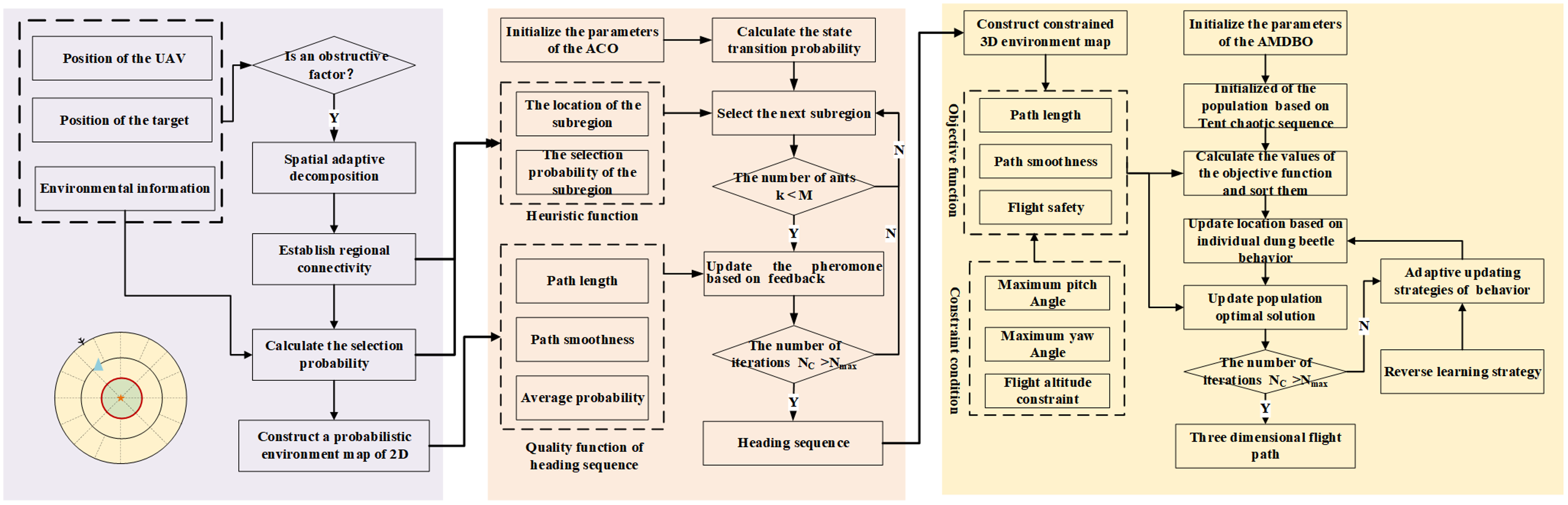
Graphical Abstract